 by
by Scientists have been trying to build snake-like, limbless robots for decades. These robots could come in handy in search and rescue situations, where they could tackle collapsed buildings to find and help survivors.
With slender, flexible bodies, limbless robots could easily move through confined and cluttered spaces such as debris fields, where walking or wheeled robots and human rescuers fail.
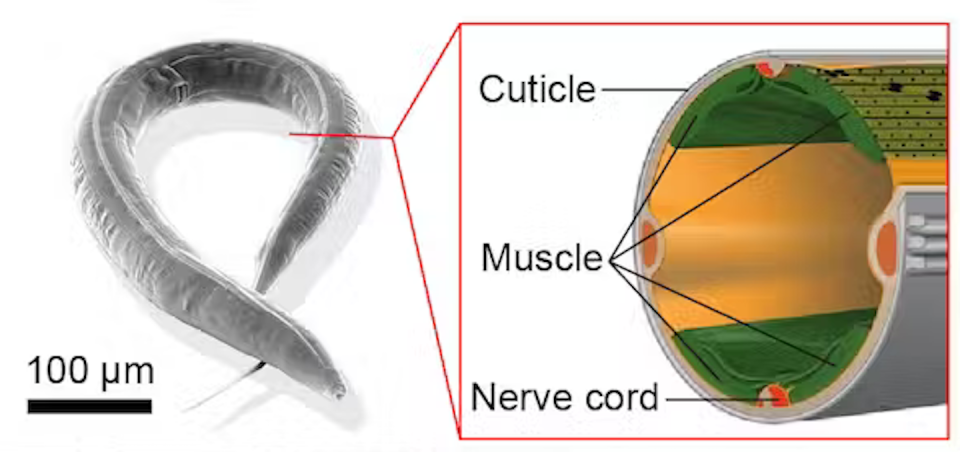
However, even the most advanced limbless robots have not evolved to move with the agility and flexibility of worms and snakes in difficult terrain. Even the tiny nematode worm Caenorhabditis eleganswith relatively simple nervous systems, can get through difficult physical environments.
As part of a team of roboticists and physicists, we wanted to explore this discrepancy in performance. But instead of looking to neuroscience for an answer, we turned to biomechanics.
We set out to build a robot model that propelled its body using a mechanism similar to how worms and snakes power their movement.
Undulators and mechanical intelligence
Over thousands of years, organisms have developed complex nervous systems that allow them to sense their physical environment, process this information and make precise body movements to get around obstacles.
In robotics, engineers design algorithms that take information from sensors on the robot’s body – a type of robot’s nervous system – and use that information to decide how to move. These algorithms and systems are usually complex.
Our team wanted to find a way to simplify these systems by highlighting a mechanically controlled approach to dealing with obstacles that does not require sensors or computation. To do that, we turned to examples from biology.
Animals do not rely entirely on their neurons – brain cells and peripheral nerves – to control movement. They also use the physical properties of their bodies – for example, the elasticity of their muscles – to help them respond to their environment spontaneously, before their neurons even have a chance to react.
While computational systems are governed by the laws of mathematics, mechanical systems are governed by physics. To achieve the same task, scientists can design an algorithm or carefully design a physical system.
For example, robots and limbless animals move through the world by bending parts of their bodies left and right, a type of movement called undulating. If they collide with an obstacle, they must turn away and go around it by bending more to one side than the other.
Scientists could achieve this with a robot by attaching sensors to its head or body. Then they could design an algorithm that tells the robot to turn off or go around the barrier when it “feels” a large enough force on its head or body.
Alternatively, scientists could carefully choose the robot’s materials and the arrangement and strength of its motors so that collisions would spontaneously create a body shape that led to a turn. This robot would have what scientists call “mechanical intelligence”.
If scientists like us can understand how the bodies of organisms respond mechanically to contact with objects in their environment, we can design better robots that can deal with obstacles without having to program complex algorithms.
If you compare a diverse array of archaic organisms to the growing zoo of “robotic snakes,” one difference between the robots and the biological funnels becomes apparent. Almost all curved robots bend their bodies using a series of segments connected to motors at each joint. But that’s not how living organisms bend.
In contrast, all limbless organisms, from large snakes to the lowly microscopic nematode, move their limbs not from a single rotary motor system but instead through two bands of muscles on either side of the body. To an engineer, this design may seem counter-intuitive. Why control something with two muscles or motors when one could do the job?
To get to the bottom of this question, our team built a new robot called MILLR, a mechanically intelligent limbless robot, inspired by the two muscle bands on snakes and worms. MILLR has two independent control cables that pull each joint left and right, bilaterally.
We found that this method allows the robot to move spontaneously around obstacles without detecting its surroundings and to actively change its body posture to conform to the environment.
Build an intelligent mechanical robot
Rather than mimicking the detailed muscular anatomy of a particular organism, MILLR applies forces to each side of the body by coiling and uncoiling a cable.
In this way, it represents the muscle activation methods used by snakes and nematodes, where the left and right sides activate in turn. This method of activation pulls the body towards one side or the other by tensing on one side, while the other side relaxes and is passively pulled.
By changing the amount of softness in the cables, we can achieve different degrees of body stiffness. When the robot collides with an obstacle, depending on the cable tension, it keeps its shape selectively or bends under the force of the obstacle.
We found that if the robot was actively bending to one side and had a force in the same direction, the body complied with the force and bent further. If, on the other hand, the robot experienced a force against the hip, it would remain rigid and push itself away from the obstacle.
Due to the pattern of tension along the body, head-on collisions resulted in a deflection around the obstacle that would normally cause the robot to stop moving or jam itself. The robot could push itself forward consistently.
MILLR being tested
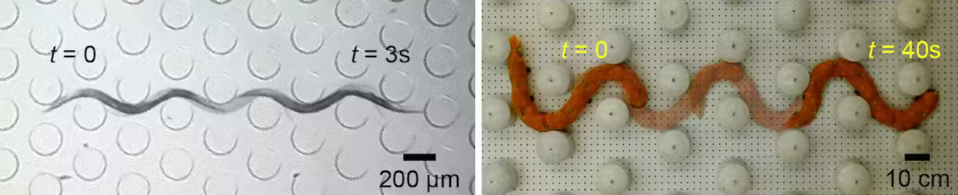
To investigate the benefits of mechanical intelligence, we built tiny obstacle courses and put nematode worms through them to see how well they performed. We put MILLR through a similar course and compared the results.
MILLR moved through its course as efficiently as real worms. We observed that the worms made the same type of body movements when they hit obstacles as MILLR did.
The principles of mechanical intelligence may extend beyond the realm of nematodes. Future research could look at designing robots based on many other types of organisms for applications ranging from search and rescue to exploring other planets.
This article is republished from The Conversation, a non-profit, independent news organization that brings you facts and analysis to help you make sense of our complex world.
It was written by: Tianyu Wang, Georgia Institute of Technology and Christopher Pierce, Georgia Institute of Technology.
Read more:
This work was supported by the National Science Foundation’s Living Systems Physics Student Research Network, the NSF-Simons Southeast Center for Mathematics and Biology, an Army Research Office Grant, and a Dunn Family Professorship.